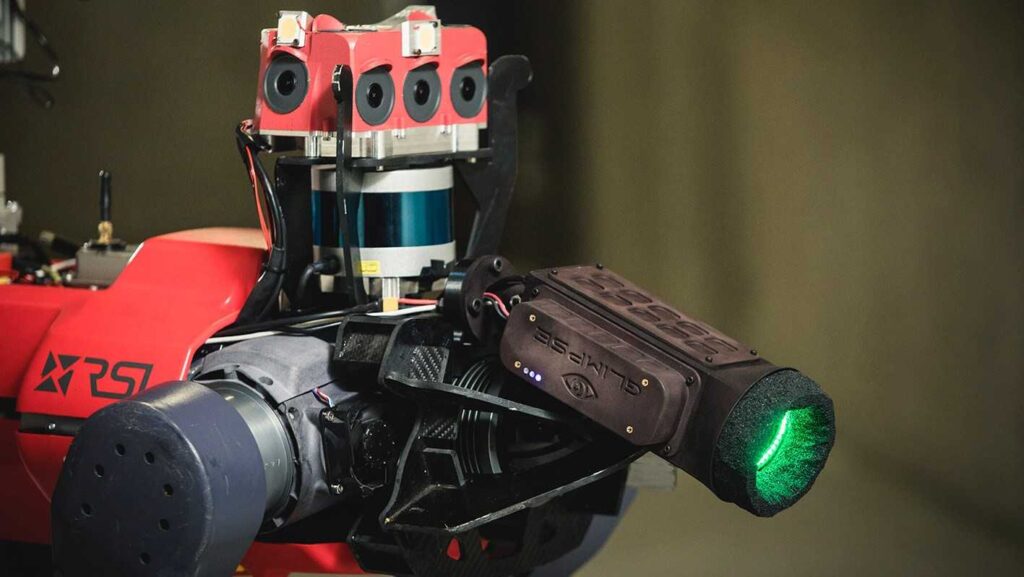
In the vast, rocky terrains of the moon, a trio of legged robots, developed by Swiss researchers led by ETH Zurich, is envisioned to embark on a mission, not of solitude but of collaborative exploration, seeking to unravel the mysteries embedded in the celestial body’s surface. The robots, originating from ANYmal, are not mere wanderers; they are equipped with measuring instruments, designed to seek out minerals and potentially pave the way for future lunar Exploration.
The concept of deploying a team, rather than a single rover, introduces a novel approach to space exploration. “Using multiple robots has two advantages,” elucidates Philip Arm, a doctoral student in the group led by ETH Professor Marco Hutter. He emphasizes the dual benefits of simultaneous specialized task execution and the inherent redundancy that a robot team offers, ensuring that a mission can proceed even in the face of individual robot failure.

The robots, while sharing a common origin, are not identical in their capabilities. Two of them are specialists: one adept at mapping and geological classification, utilizing a laser scanner and various cameras, and the other proficient in precise rock identification through a Raman spectrometer and a microscopy camera. The third robot, dubbed the generalist, is capable of both mapping and rock identification but with less precision, acting as a fail-safe to ensure mission continuity should a specialist robot encounter issues.
The team of robots has already demonstrated their prowess at the European Space Resources Innovation Centre (ESRIC) in Luxembourg. Here, they not only navigated a test site modeled after the lunar surface but also successfully identified minerals, earning them victory in a European competition for lunar exploration robots, alongside colleagues from Germany. Their success was not solely attributed to their individual capabilities but also to the built-in redundancy in their exploration system, which was particularly lauded by the jury at the ESRIC and ESA Space Resources Challenge.
Similar Posts
Hendrik Kolvenbach, a senior scientist in Professor Hutter’s group, sheds light on the unique advantages of legged robots, particularly the ANYmal, in space exploration. “Legged robots like our ANYmal cope well in rocky and steep terrain, for example when it comes to climbing down into a crater,” he explains, highlighting the limitations of wheeled robots in such challenging conditions. However, he acknowledges the speed advantage of wheeled robots on less demanding terrains, suggesting a future where different robots, each with their own mode of locomotion, collaborate in exploration missions.
The researchers are not resting on their laurels. Future plans involve enhancing the autonomy of the robots. Currently, all data from the robots is channeled into a control center where an operator assigns tasks. The vision is to develop semi-autonomous robots that can assign certain tasks amongst themselves, albeit with control and intervention options for the operator, ensuring a blend of autonomous and manual control in missions.
This innovative approach to space exploration, combining the strengths of varied robots and ensuring mission resilience through redundancy, offers a glimpse into the future of extraterrestrial exploration. The researchers, awarded a one-year research contract to further develop this technology, stand on the precipice of potentially redefining how we explore the unknown, ensuring that the mysteries of the lunar surface, and perhaps beyond, are within our reach.
The research, documented in the journal Science Robotics, is not just a testament to technological advancement but also a beacon, illuminating the possibilities of collaborative lunar exploration in the vast, uncharted terrains of celestial bodies.